[笔记]非线性自适应控制器设计,对应对应DR_CAN老师的【Advanced控制理论】16
简单的自适应控制器设计,使用李雅普诺夫函数证明系统稳定性后解出对应的控制输入u,对应DR_CAN老师的【Advanced控制理论】16
由于博客对lateX容忍度不高,即便我开启了数学公式解析,所以想更舒服的观看的点击这里
$\dot{x}=a*{x}^{2}+u$
其中$x$是系统状态,$a$为参数,$u$为系统输入。
设置期望状态$ x}_{d}} $,状态误差为$e={{x}_{d}}-x\text{ }(2)$,控制目标为$e\to 0$
一、假设参数$a$为已知量
对(2)式求导后为:
$\dot{e}={{\dot{x}}_{d}}-\dot{x}={{\dot{x}}_{d}}-a{{x}^{2}}-u\text{ }(3)$
设计Lyapunov函数为(易知式(4)为PD(正定)):
${{V}_{(e)}}=\frac{1}{2}{{e}^{2}}\text{ }(4)$
对(4)求导并把(3)带入得:
${{\dot{V}}_{(e)}}=e\dot{e}=e({{\dot{x}}_{d}}-a{{x}^{2}}-u)\text{ }(5)$
为了满足${{\dot{V}}_{(e)}}$为ND(负定),设${{\dot{x}}_{d}}-a{{x}^{2}}-u=-ke$,
此时,${{\dot{V}}_{(e)}}=-k{{e}^{2}}$,显然此时L导数为负定,即满足系统稳定性的条件。
由此可以得出控制输入为:
$u={{\dot{x}}_{d}}-a{{x}^{2}}+ke\text{ }(6)$
二、假设参数$a$为未知量
如一中假设参数$a$为已知量,但一般参数$a$都是未知量即一个缓慢变化的常数(例如一个机械臂需要抓取不同质量的物体,那么这个质量就是一个短时间不会变化的常数,此时$\dot{a}=0$)。
此时同样设状态误差$e={{x}_{d-x\text{ (2)}$,
$\dot{e}={{\dot{x}}_{d}}-\dot{x}={{\dot{x}}_{d}}-a{{x}^{2}}-u\text{ }(3)$
因为参数$a$为未知量,此时需要系统估计该值,设估计值为$\widehat{a}$
估计误差为:$\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widetilde{a}}}\,=\dot{a}-\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widehat{a}}}\,\text{ }$,其中$\dot{a}=0$
$\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widetilde{a}}}\,=-\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widehat{a}}}\,\text{ (7)}$
此时设计Lyapunov函数(PD)为:
${{V}_{(e,a)}}=\frac{1}{2}{{e}^{2}}+\frac{1}{2}{{\widetilde{a}}^{2}}\text{ }(8)$
对(8)求导并带入(3)与(7)得:
${{\dot{V}}_{(e,a)}}=e({{\dot{x}}_{d}}-a{{x}^{2}}-u)-\widetilde{a}\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widehat{a}}}\,\text{ }(9)$
为了满足(9)为负定,设$u={{\dot{x}}_{d}}-\widehat{a}{{x}^{2}}+ke\text{ }(10)$
将(10)带入(9)得:
${{\dot{V}}_{(e,a)}}=-k{{e}^{2}}-\widetilde{a}(e{{x}^{2}}+\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widehat{a}}}\,)\text{ }(11)$
易知,$-k{{e}^{2}}$为ND,若令$\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widehat{a}}}\,=-e{{x}^{2}}$,此时${{\dot{V}}_{(e,a)}}=-k{{e}^{2}}$为NSD(半负定)。
引入引理1:假设
①$V\ge 0$
②$\dot{V}<-g(t)\text{ }(g(t)\ge 0)$且$\dot{g}(t)\in {{L}_{\infty }}$
那么$g(t)$有界,即$\underset{t\to \infty }{\mathop{\lim }}\,g(t)=0$
由引理1知,式(11)在设$\overset{\text{ }\!\!\cdot\!\!\text{ }}{\mathop{\widehat{a}}}\,=-e{{x}^{2}}$情况下满足李雅普诺夫稳定条件。
$\widehat{a}=-\int_{0}^{t}{e{{x}^{2}}dt}$
最终得控制输入$u$为:
$u={{\dot{x}}_{d}}+{{x}^{2}}\int_{0}^{t}{e{{x}^{2}}dt}+ke\text{ }(12)$
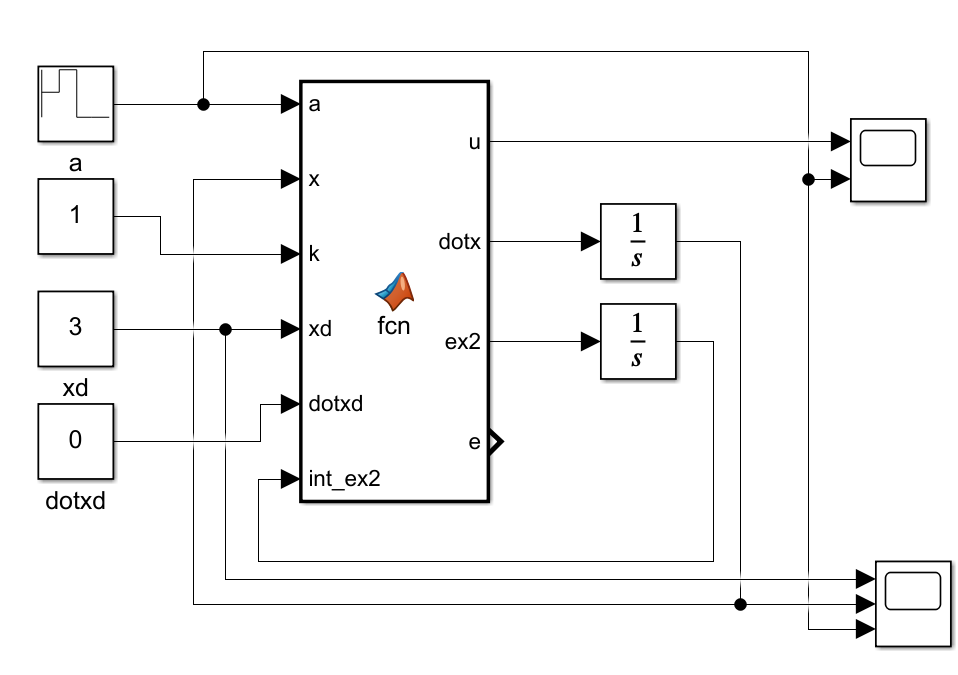
Matlab/Simulink仿真为:

function [u, dotx, ex2, e] = fcn(a, x, k, xd, dotxd, int_ex2)
%#codegen
e = xd - x;
ex2 = e*x^2;
u = dotxd + int_ex2*x^2 + k*e;
dotx = a*x^2 + u;在目标状态$x_d$不变得情况下,未知参数$a$的改变会使控制输入经历一段时间的调整后$e\to 0$。
在不知道参数$a$的情况下,$\widehat{a}$可以很好的估计参数值。
本文作者:sheetung
本文链接:https://cutech.space/archives/adcontrol16.html
版权声明:转载时须注明出处(包括原作者和文章链接)及本声明
