[笔记]非线性自适应控制器设计,对应对应DR_CAN老师的【Advanced控制理论】16
简单的自适应控制器设计,使用李雅普诺夫函数证明系统稳定性后解出对应的控制输入u,对应DR_CAN老师的【Advanced控制理论】16
其中
设置期望状态
一、假设参数
对(2)式求导后为:
设计Lyapunov函数为(易知式(4)为PD(正定)):
对(4)求导并把(3)带入得:
为了满足
此时,
由此可以得出控制输入为:
二、假设参数
如一中假设参数
此时同样设状态误差
因为参数
估计误差为:
此时设计Lyapunov函数(PD)为:
对(8)求导并带入(3)与(7)得:
为了满足(9)为负定,设
将(10)带入(9)得:
易知,
引入引理1:假设
①
②
那么
由引理1知,式(11)在设
最终得控制输入
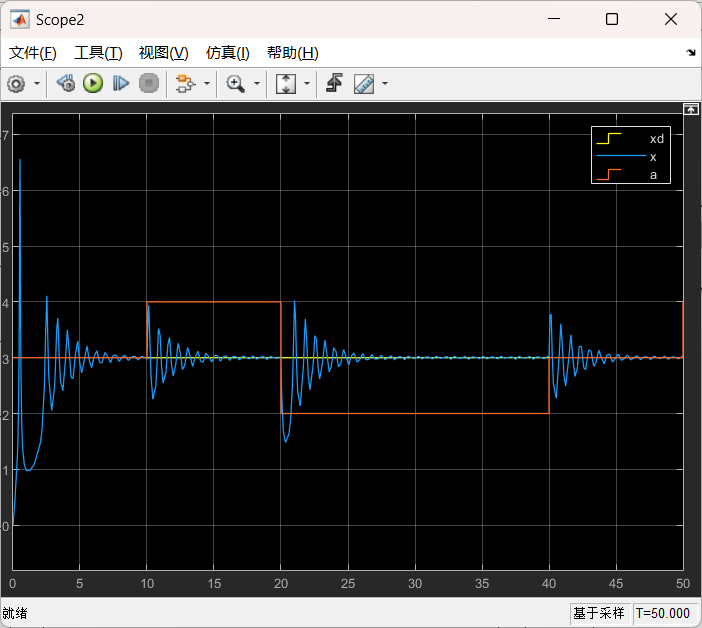
Matlab/Simulink仿真为:
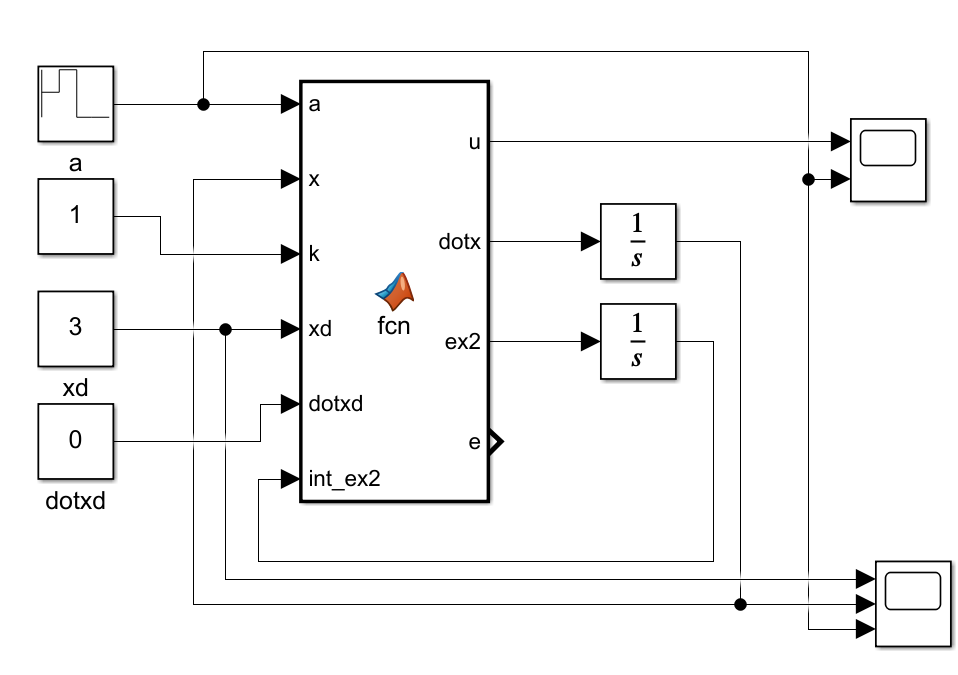
xxxxxxxxxxfunction [u, dotx, ex2, e] = fcn(a, x, k, xd, dotxd, int_ex2)%#codegene = xd - x;ex2 = e*x^2;u = dotxd + int_ex2*x^2 + k*e;dotx = a*x^2 + u;
在不知道参数
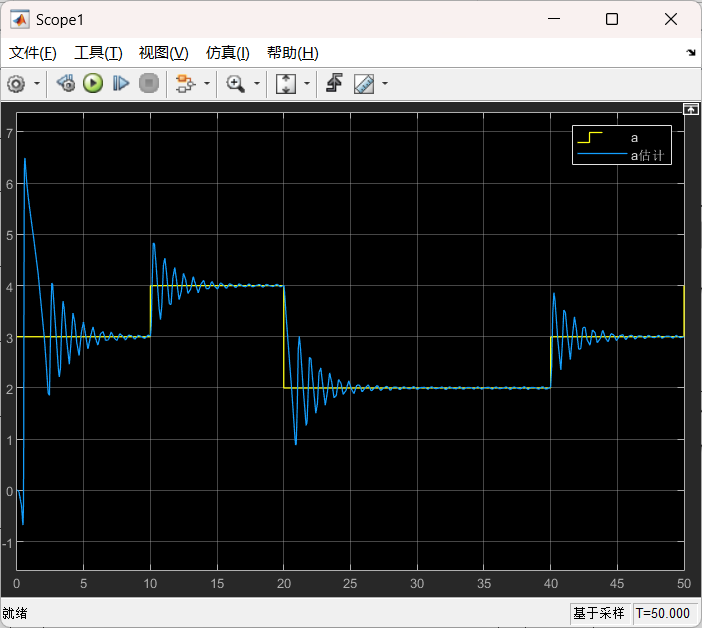
在目标状态